导读: 有些厂家生产的很多设备精度和速度都比其他厂家好,这不是偶然的。电控系统的设计和调试往往非常关键。 很多人都知道PID控制器。其实在运动控制中,如果只用PID进行调节,其控制速度和精度都不是最好的。原因是PID控制是反馈控制,只能进行测量。 pid调节,pid调节参数设置技巧有些厂家生产的很多设备,其精度和速度就是比其他厂家的好,这不是偶然的,电控系统的设计和调试往往十分关键。 很多人都知道PID控制器,其实在运动控制中,如果只使用PID进行调节,其控制速度和精度并不是最佳的,原因是PID控制是反馈控制,只有测出反馈值,然后才通过计算给定值和反馈值的误差经过PID计算才能得出控制输出,所以输出总是滞后于误差的产生,对于高精度的运动控制,您还需要配置前馈参数,以提高控制的精度和快速性,这样可以减小PID参数的积分深度,使得运动控制更精更快,带前馈单元的数控系统图,如下图所示。 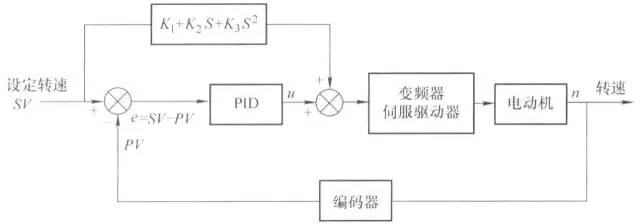
前馈参数包括前馈比例参数K1,前馈速度参数K2和前馈加速度参数K3,一般情况下,取K2=0,K3=0,之用前馈比例参数K1即可达到很高的控制精度。 前馈比例参数K1可以通过计算得到,K1与编码器分辨率Re1(10000P/r)、额定转速ne(如1000r/min)、前馈单元(如运动控制器的D-A输出单元)输出满幅电压(如±10V)对应的分辨率Re2(如2的15次方位)有关,如下式,式中k0是一个系数,因不同的运动控制器而不同。 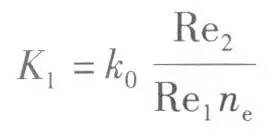
前馈参数的确定——“碰瓷法” 简单设定PID三个参数,只要不振荡即可,设一个给定速度SV1,记录下电动机的转速n1,然后设定PID三个参数都为零,保持给定速度SV1,K1值从0开始增加,直到电动机的输出转速等于n1,记录下对应的K1值K10,则: K1=K10 如果有几个电动机同步运行,令一个PID的三个参数为零,改变K1值,使其与其他电动机的速度基本相等,则这个K10值即为所得。 “碰瓷法”也可以用于过程控制的前馈参数确定。 PID参数的一种简单调整方法——“二四法则” 在运动控制系统中,如果运动控制器提供PID参数自整定算法,可以进行自整定,如果运动控制器中没有自整定功能,就需要自己对PID参数进行调整,有很多书籍对比有讲解,最后让响应曲线超调部分的前后衰减比为4:1,由于多数方法都需要有专业仪器进行观察,在现场应用有时就很不方便,很多新手会不知所措,以下介绍一种简单的PID参数确定方法——“二四法则”供大家参考。 1)PID三个参数为零,P从0开始逐渐增加,直到听到电动机轻微的振动,此时为P0,则比例P取为: P=P0/2 2)P=0.5P0,D=0,I从0开始逐渐增加,直到听到电动机轻微的振动,此时为I0,则积分I取为: I=I0/2 3)P-0.5P0,I=0.5I0,D从0开始逐渐增加,直到听到电动机轻微的振动,此时为D0,则微分D取为: D=D0/4 前馈参数K1及PID参数调整完后,可以用吴式方法测试运动控制性能的优劣,让速度给定SV为一个正弦参数: SV2=k2sin(ωt) 由于速度给定SV的速度变化,求导后卫余弦函数,加速度又为正弦函数,所以我们可以十分方便地分析。测试反馈值PV,对比SV和PV,分析误差变化、速度误差变化、加速度误差变化情况 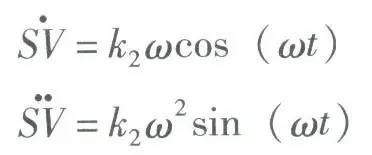
本文选自《电气自动化工程师速成教程》第2版,由机械工业出版社E视界整理发布。 (微信号:cmp_dgdz1) 总结:以上内容就是对于pid调节,pid调节参数设置技巧的详细介绍,文章内容部分转载自互联网,希望对您了解pid调节有帮助和参考的价值。
|